GY-521 Inertial Measurement Unit
Background
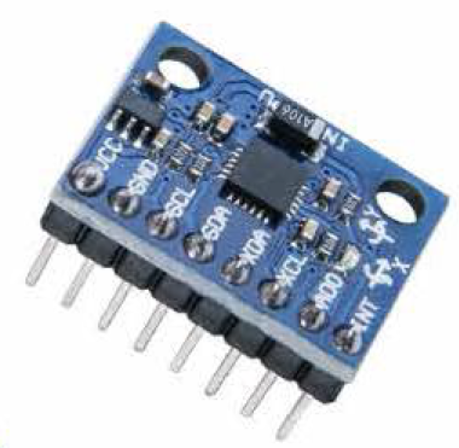
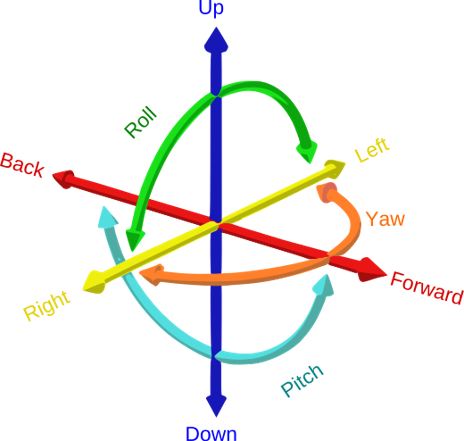
An IMU or inertial measurement unit measures 6 degrees of freedom (DoF) which will tell us the acceleration in all three directions (x, y, z) as well as the angular velocity and rotation about the 3 axes (roll, pitch, yaw). An IMU is typically comprised of an accelerometer and a gyroscope. The accelerometer is responsible for measuring the acceleration in all 3 directions. However, it has difficulty differentiating between device acceleration and the earth's gravity when moving. The Gyroscope helps maintain this balance and ensures accurate readings. The gyroscope is responsible for measuring the angular velocity. The part is called a GY-521; however, the ship is an MPU6050. This chip can also measure temperature. It communicates using I2C which stands for Inter-Integrated Circuit and is typically pronounced eye-squared-see.
Hardware Description
Arduino Uno Pinout:
- VCC - 5V - Power
- GND - GND - Ground Connection
- SCL - Pin A5 - I2C Clock
- SDA - Pin A4 - I2C Data
- XDA - don't connect - auxiliary data
- XCL - don't connect - auxiliary clock
- AD0 - don't connect - when this pin is set to low the I2C address of the board will be 0x68, when it is set to high the I2C address will be 0x69
- INT - don't connect - interrupt digital output
Software Description
See the complete example below with information on how to set up and use the MPU6050 IMU sensor using the Adafruit MPU6050 library.
https://create.arduino.cc/editor/mjdargen_ravens/e06300fc-a50c-45cb-a92e-6f39238a750a/preview